Process
Concept
A process is an instance of a
program in execution.
Process – a program in execution;
process execution must progress in sequential fashion.
A process includes:
1.
program counter
2.
Stack
3.
data section
Process State
- Processes may be in one of 5 states, as shown in Figure 3.2 below.
- New - The process is in the stage of being created.
- Ready - The process has all the resources available that it needs to run, but the CPU is not currently working on this process's instructions.
- Running - The CPU is working on this process's instructions.
- Waiting - The process cannot run at the moment, because it is waiting for some resource to become available or for some event to occur. For example the process may be waiting for keyboard input, disk access request, inter-process messages, a timer to go off, or a child process to finish.
- Terminated - The process has completed.

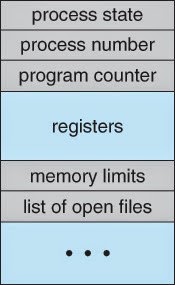
Process Control Block
For each process there is a Process Control Block, PCB, which stores the following ( types of ) process-specific information, as illustrated in Figure 3.1. ( Specific details may vary from system to system. )- Process State - Running, waiting, etc., as discussed above.
- Process ID, and parent process ID.
- CPU registers and Program Counter - These need to be saved and restored when swapping processes in and out of the CPU.
- CPU-Scheduling information - Such as priority information and pointers to scheduling queues.
- Memory-Management information - E.g. page tables or segment tables.
- Accounting information - user and kernel CPU time consumed, account numbers, limits, etc.
- I/O Status information - Devices allocated, open file tables, etc.
(Process control block)
Diagram
showing CPU switch from process to process
Threads
- Modern systems allow a single process to have multiple threads of execution, which execute concurrently.
Process
Scheduling
- The two main objectives of the process scheduling system are to keep the CPU busy at all times and to deliver "acceptable" response times for all programs, particularly for interactive ones.
- The process scheduler must meet these objectives by implementing suitable policies for swapping processes in and out of the CPU.
- ( Note that these objectives can be conflicting. In particular, every time the system steps in to swap processes it takes up time on the CPU to do so, which is thereby "lost" from doing any useful productive work. )
Scheduling Queues
- All processes are stored in the job queue.
- Processes in the Ready state are placed in the ready queue.
- Processes waiting for a device to become available or to deliver data are placed in device queues. There is generally a separate device queue for each device.
- Other queues may also be created and used as needed.
Schedulers
- A long-term scheduler is typical of a batch system or a very heavily loaded system. It runs infrequently, ( such as when one process ends selecting one more to be loaded in from disk in its place ), and can afford to take the time to implement intelligent and advanced scheduling algorithms.
- The short-term scheduler, or CPU Scheduler, runs very frequently, on the order of 100 milliseconds, and must very quickly swap one process out of the CPU and swap in another one.
- Some systems also employ a medium-term scheduler. When system loads get high, this scheduler will swap one or more processes out of the ready queue system for a few seconds, in order to allow smaller faster jobs to finish up quickly and clear the system.
- An efficient scheduling system will select a good process mix of CPU-bound processes and I/O bound processes.
Queueing-diagram representation of
process scheduling:-

CPU Scheduling
CPU
Scheduling is the process used to maximize the CPU utilization.
CPU Scheduling is done in following
circumstances:
- When process switches from the running stage to waiting state
- When process switches from the running stage to ready state
- When process switches from the waiting stage to ready state
CPU Scheduling is of two types
depending on nature
- Preemptive Scheduling
- Non –Preemptive Scheduling
Preemptive Scheduling
Allows the process to be interrupted
in the midst of its execution.
Non –Preemptive Scheduling
Doesnot allows the process to be
interrupted in the midst of its execution.
Note: The main aim of the scheduling is to maximize the CPU
When two process are executed simultaneously they are called concurrent process.
Scheduling
algorithms
1.First come, First served (FCFS)
In this scheduling algorithm, the
process which comes first are executed first.
Process Burst Time
P1
24
P2
3
P3
3
Suppose
that the processes arrive in the order: P1 , P2 , P3
The Gantt
Chart for the schedule is:
|
P1
|
P2
|
P3
|
0
24
27
30
Waiting time for P1 = 0; P2 = 24; P3 = 27
Average waiting time: (0 + 24 + 27)/3 = 17
Suppose
that the processes arrive in the order
P2
, P3 , P1 .
The Gantt
chart for the schedule is:
|
P2
|
P3
|
P1
|
0
3
6
30
Waiting time for P1 = 6; P2 = 0; P3 = 3
Average waiting time: (6 + 0 + 3)/3 = 3
2. Shortest-Job-First
(SJF) Scheduling
In
this scheduling algorithm, the process with short execution time will be
executed first.
Process Arrival
Time Burst Time
P1
0.0
7
P2
2.0
4
P3
4.0
1
P4
5.0
4
SJF (non-preemptive)
|
P1
|
P3
|
P2
|
P4
|
0
7
8
12
16
Average waiting time = [0
+(8-2)+(7-4) +(12-5)] /4 =4
Example
of Preemptive SJF
Proces
Arrival Time
Burst Time
P1
0.0
7
P2
2.0
4
P3
4.0
1
P4
5.0
4
SJF (preemptive)
|
P1
|
P2
|
P3
|
P2
|
P4
|
P1
|
0
2
4
5
7
11
16
Average waiting time = (9 + 1
+ 0 +2)/4 =3
3.Priority Scheduling
In this scheduling algorithm, the process with highest priority process will be executed first, then second highest priority process will be executed, so on at last process with least priority will be executed.
|
Process
|
Burst Time
|
Priority
|
|
P1
|
19
|
2
|
|
P2
|
3
|
1
|
|
P3
|
5
|
3
|
If the order of the arrival is like
in the order shown in the above table, then inorder to schedule using SJF,
first Gantt is plotted.
|
Gantt
Chart
|
||
|
P2
|
P1
|
P3
|
Gantt chart denotes the sequence of
the exectution of the process. Here sequence of execution is P2,P1,P3.
Waiting time of the process are
shown below
P1-----3
P2-----0
P3-----22
Thus, average wating time will be
average waiting waiting time=
(3+0+22)/3=8.3
4.Round Robin Scheduling
Round robin scheduling is similar to FCFS scheduling, except that CPU
bursts are assigned with limits called time quantum.
Example of RR with Time Quantum = 4
Process Burst Time
P1
24
P2
3
P3
3
The Gantt chart is:
|
P1
|
P2
|
P3
|
P1
|
P1
|
P1
|
P1
|
P1
|
0
4
7
10
14
18
22
26 30
Average waiting time
= [(30-24)+4+7]/3 = 17/3 =5.66
Multiple-Processor
Scheduling
- When multiple processors are available, then the scheduling gets more complicated, because now there is more than one CPU which must be kept busy and in effective use at all times.
- Load sharing revolves around balancing the load between multiple processors.
- Multi-processor systems may be heterogeneous, ( different kinds of CPUs ), or homogenous, ( all the same kind of CPU ). Even in the latter case there may be special scheduling constraints, such as devices which are connected via a private bus to only one of the CPUs.
Process Synchronization:
Process synchronization refers to the idea that
multiple processes are to join up or handshake at a certain point, in order to
reach an agreement or commit to a certain sequence of action.Thread
synchronization or serialization, strictly defined, is the application of
particular mechanisms to ensure that two concurrently-executing threads or processes do not execute specific
portions of a program at the same time. If one thread has begun to execute a
serialized portion of the program, any other thread trying to execute this
portion must wait until the first thread finishes. Synchronization is used to
control access to state both in small-scale multiprocessing systems -- in
multithreaded environments and multiprocessor computers -- and in distributed
computers consisting of thousands of units -- in banking and database systems,
in web servers, and so on.
Critical Section
- set of instructions that must be controlled so as to allow exclusive access to one process
- rarely: access to the critical section is limited to n processes instead of one process
- execution of the critical section by processes is mutually exclusive in time
Solution to the Critical Section Problem must meet three conditions...
- mutual exclusion:
if process
 is
executing in its critical section, no other process is executing in its
critical section
is
executing in its critical section, no other process is executing in its
critical section - progress: if no process is executing in its critical section and there exists some processes that wish to enter their critical sections, then only those processes that are not executing in their remainder section can participate in the decision of which will enter its critical section next, and this decision cannot be postponed indefinitely
- if no process is in critical section, can decide quickly who enters
- only one process can enter the critical section so in practice, others are put on the queue
- bounded waiting: there must exist a bound on the number of times that other processes are allowed to enter their critical sections after a process has made a request to enter its critical section and before that request is granted
- The wait is the time from when a process makes a request to enter its critical section until that request is granted
- in practice, once a process enters its critical section, it does not get another turn until a waiting process gets a turn (managed as a queue)
Semaphore:-
a semaphore is a variable or abstract data type that is used for controlling
access, by multiple processes, to a common resource in a parallel programming or a multi user
environment.
A semaphore is a protected variable
whose value can be accessed and altered only by the operations P and V and
initialization operation called 'Semaphoiinitislize'.
Binary Semaphores can assume only
the value 0 or the value 1 counting semaphores also called general semaphores
can assume only nonnegative values.
The P
(or wait or sleep or down) operation on semaphores S, written as P(S) or wait (S), operates as follows:
P(S):
IF S > 0
THEN S := S - 1
ELSE (wait on S)
THEN S := S - 1
ELSE (wait on S)
The V
(or signal or wakeup or up) operation on semaphore S, written as V(S) or signal (S), operates as follows:
V(S):
IF (one or more process are waiting on S)
THEN (let one of these processes proceed)
ELSE S := S +1
THEN (let one of these processes proceed)
ELSE S := S +1
Operations P and V are done as
single, indivisible, atomic action. It is guaranteed that once a semaphore
operations has stared, no other process can access the semaphore until
operation has completed. Mutual exclusion on the semaphore, S, is enforced within
P(S) and V(S).
If several processes attempt a P(S)
simultaneously, only process will be allowed to proceed. The other processes
will be kept waiting, but the implementation of P and V guarantees that
processes will not suffer indefinite postponement.
Classical probems of synchronization
- The Bounded Buffer Problem (also called the The Producer-Consumer Problem)
- The Readers-Writers Problem
- The Dining Philosophers Problem
The Bounded Buffer Problem
- a buffer which can store n items
- a producer process which creates the items (1 at a time)
- a consumer process which processes them (1 at a time)
A consumer cannot consume unless there is at least one produced item.
Semaphore empty=N, full=0, mutex=1;
process producer {
while (true) {
empty.acquire();
mutex.acquire();
// produce
mutex.release();
full.release();
}
}
process consumer {
while (true) {
full.acquire();
mutex.acquire();
// consume
mutex.release();
empty.release();
}The semaphore mutex provides mutual exclusion for access to the buffer.
What are the semaphores empty and full used for?
The Readers-Writers Problem
Each process is classified as either a reader or writer.
Multiple readers may access the file simultaneously.
A writer must have exclusive access (i.e., cannot share with either a reader or another writer).
A solution gives priority to either readers or writers.
- readers' priority: no reader is kept waiting unless a writer has already obtained permission to access the database
- writers' priority: if a writer is waiting to access the database, no new readers can start reading
- in the readers' priority version, writers may starve
- in the writers' priority version, readers may starve
Semaphore mutex = 1;
Semaphore db = 1;
int readerCount = 0;
process writer {
db.acquire();
// write
db.release();
}
process reader {
// protecting readerCount
mutex.acquire();
++readerCount;
if (readerCount == 1)
db.acquire();
mutex.release();
// read
// protecting readerCount
mutex.acquire();
--readerCount;
if (readerCount == 0)
db.release;
mutex.release();
}readerCount is a <cs> over which we must maintain control and we use mutex to do so.
Self-study: address starvation in this solution, and then develop a writers' priority semaphore solution, and then address starvation in it.
The Dining Philosophers Problem
The dining philosophers problems is an example of a large class or concurrency control problems; it is a simple representation of the need to allocate several resources among several processes in a deadlock-free and starvation-free manner.
A semaphore solution:
// represent each chopstick with a semaphore
Semaphore chopstick[] = new Semaphore[5]; // all = 1 initially
process philosopher_i {
while (true) {
// pick up left chopstick
chopstick[i].acquire();
// pick up right chopstick
chopstick[(i+1) % 5].acquire();
// eat
// put down left chopstick
chopstick[i].release();
// put down right chopstick
chopstick[(i+1) % 5].release();
// think
}
}This solution guarantees no two neighboring philosophers eat simultaneously, but has the possibility of creating a deadlock (how so?).
Self-study: develop a deadlock-free semaphore solution.
Play the what if scenario game with all of these problems.
Uses of semaphores
Semaphores can be used for more than simply protecting a
critical section.
- protecting acccess to a critical section (e.g., db in the R/W problem)
- as a mutex lock (e.g., to protect the shared variables used in solving a probem such as readerCount above)
- to protect a relationship (e.g., empty and full as used in the P/C problem)
Nice notes
ReplyDelete